Questões de Concurso
Filtrar
180 Questões de concurso encontradas
Página 20 de 36
Questões por página:

O valor do trem de engrenagens mostrado na figura acima é igual a
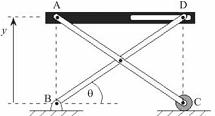
As barras BD e AC, ilustradas na figura acima, têm 4 m de comprimento cada uma. Nesse caso, o deslocamento linear da plataforma AD, representado pela coordenada y, em consequência do movimento angular da barra BD, dada pelo ângulo θ, é expresso por

A partir do diagrama de corpo livre mostrado na figura acima, considerando que momentos no sentido horário são positivos, assinale a opção correspondente à equação que representa o equilíbrio de momentos em torno do ponto A.
Uma polia motora de 40 mm de diâmetro inicia o movimento de rotação a partir do repouso impulsionada por um motor elétrico que imprime uma aceleração angular em função do tempo (t) de 2πt² rad/s² nos primeiros 5 segundos de operação. A polia motora é conectada com a polia movida de 10 mm de diâmetro utilizando um sistema de correia. Considerando que a correia não escorregue das polias e que não apresente variação de comprimento, o número de rotações e a aceleração angular da polia movida após 3 s de operação do motor são, respectivamente:
