Concurso:
TRANSPETRO
Disciplina:
Engenharia Eletrônica
Um sistema dinâmico foi modelado segundo a equação diferencial a seguir, na qual a função forçante é a tensão u(t) e a variável independente é a intensidade de corrente i(t).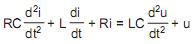
A função de transferência do sistema elétrico é
