Em sua empresa, você é o engenheiro eletricista responsável por estabilizar um equipamento experimental. O fabricante do equipamento informa que a modelagem da dinâmica do mesmo é dada pela seguinte representação no espaço de estados:
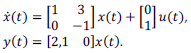
As variáveis de entrada, de saída e o vetor de estado são, respectivamente, u(t), y(t) e x(t) tendo componentes reais e de dimensões compatíveis com as matrizes do sistema.
Utilizando-se uma realimentação negativa, com o vetor x(t) pré multiplicada pela matriz de ganho K = [k1 k2] ∈ R1x2, deseja-se um sistema subamortecido e assintoticamente estável.
Esse desempenho é obtido para os reais K1 e K2, se
As variáveis de entrada, de saída e o vetor de estado são, respectivamente, u(t), y(t) e x(t) tendo componentes reais e de dimensões compatíveis com as matrizes do sistema.
Utilizando-se uma realimentação negativa, com o vetor x(t) pré multiplicada pela matriz de ganho K = [k1 k2] ∈ R1x2, deseja-se um sistema subamortecido e assintoticamente estável.
Esse desempenho é obtido para os reais K1 e K2, se
