Concurso:
Petrobras
Disciplina:
Engenharia Eletrônica
Um sistema linear e contínuo apresenta a equação diferencial do seu modelo em espaço de estados, referida à entrada u(t), dada por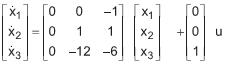
onde o vetor de estados é definido por [ x1 x2 x3 ]T.
Esse sistema tem três polos reais, cujos valores são:
