Concurso:
IFB
Disciplina:
Engenharia Eletrônica
mostrar texto associado
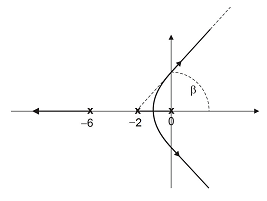
A função de transferência de malha aberta desse sistema é:
