Questões de Concurso
Filtrar
40 Questões de concurso encontradas
Página 3 de 8
Questões por página:
( ) As forças de superfícies são causadas pelo contato direto de um corpo com a superfície de outro. Em todos os casos essas forças são distribuídas pela área de contato entre os corpos.
( ) As forças de corpo são normalmente representadas por uma única força concentrada que atua sobre o corpo; um exemplo é a gravidade.
( ) A força de cisalhamento é criada quando as cargas externas tendem a torcer uma parte do corpo em relação à outra.
( ) O momento fletor é uma força que atua perpendicularmente à área. É criada sempre que as forças externas tendem a empurrar ou puxar as duas partes do corpo.
( ) O momento de torção é criado quando as cargas externas tendem a provocar o deslizamento das partes do corpo, uma sobre a outra.
A sequência correta está em
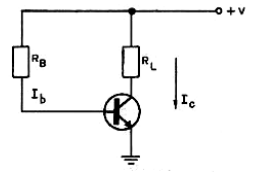
O valor de Rb é, aproximadamente:
Relacione adequadamente as colunas a seguir.
1. Método de relé em malha fechada.
2. Método do modelo interno.
3. Método do ganho e período críticos.
4. Preditor de Smith.
5. Comportamento servo.
6. Comportamento regulatório.
( ) Comportamento realizado pelo controlador do processo mediante distúrbios.
( ) Método utilizado para obter no limite da estabilidade os valores do ganho e período críticos, mas que é inviável em muitos casos na prática.
( ) Comportamento realizado para o controlador para “rastrear o setpoint”.
( ) Método utilizado para obter o ganho e o período crítico sem levar o sistema dinâmico ao limite da estabilidade.
( ) Método utilizado para se obter o controlador dado um desempenho requerido e um modelo da planta a se controlar.
( ) Minimiza os efeitos do tempo morto da planta no controle de malha.
A sequência correta está em
