Questões de Concurso
Filtrar
825 Questões de concurso encontradas
Página 51 de 165
Questões por página:
Questões por página:
Concurso:
TRF - 2ª REGIÃO
Disciplina:
Engenharia Eletrônica
O resultado da equação 011110 + 011001 em decimal é representado na alternativa:
Concurso:
TRF - 2ª REGIÃO
Disciplina:
Engenharia Eletrônica
Apesar da revolução digital que temos vivenciado, com o surgimento de dispositivos eletrônicos que associam cada vez mais todos os serviços de telecomunicações, aquele ao qual chamamos de telefone, seja ele móvel ou fixo, permanece responsável pela execução de determinadas funções em relação às centrais telefônicas. Uma destas funções é a conexão central telefônica – telefone permitindo o acesso do assinante. Neste sentido, é correto afirmar que:
Concurso:
TRF - 2ª REGIÃO
Disciplina:
Engenharia Eletrônica
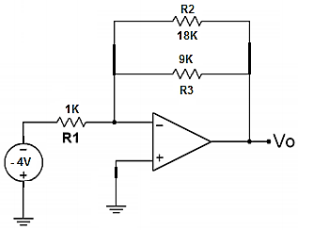
Analise o circuito a seguir.

No circuito da figura, supondo que todos os amplificadores operacionais são ideais energizados com uma fonte simétrica +/–15V, a tensão de saída Vo é:
Concurso:
TRF - 2ª REGIÃO
Disciplina:
Engenharia Eletrônica
Considere o AOP da figura ideal energizado com fonte simétrica de +/–30V.
O valor de Vo e a corrente sobre R2 são, respectivamente:
Concurso:
TRF - 2ª REGIÃO
Disciplina:
Engenharia Eletrônica

Considere o AOP da figura ideal energizado com fonte simétrica de +/–20V. O valor de Vo é representado na alternativa:
